
機械設計者のみなさんは、ステッピングモーターとサーボモーターの使い分けは出来ていますか?
ざっくりとした違いは分かるけど、「こういう理由で絶対サーボモーターじゃなきゃだめだ!」といったように、自信を持って明確に説明できない機械設計者は多いと思います。
そこでこの記事では、ステッピングモーターとサーボモーターの明確な違いを説明します。
モーターの使い分けを説明できなくて困っている設計者はぜひご覧ください。
ステッピングモーターとサーボモーターの違いは分かりづらい
私自身サーボモーターを第一優先で使用しているのですが、「ここの機構はステッピングモーターでもいいんじゃないのか?無駄にサーボモーターを選んでしまっていないか?」と思うことが多々あります。
しかし私はステッピングモーターを選定したことが無くモーターの制御設計をしたことも無いので、この問いの答えが分からずモヤモヤしている状況にありました。
そこでこのモヤモヤを無くすために、ステッピングモーターとサーボモーターの違いに関して色々と調査しました。
先輩設計者へ質問です!
— こうちゃ@機械設計ブログ (@MC_CRAFTOR) April 15, 2021
ステッピングとサーボモータの明確な使い分け理由ってなんでしょう?
・サーボが安くなってきている
・クローズドループできるステッピングもある
これらの理由で明確な差ってあまり無いような…
個人的にはトルク特性や制振制御の違いくらいかな?と思ってます🤔
上記ツイートをした結果、様々な意見を頂くことができました。
皆さんおおむね、「低負荷はステッピングモーター、高負荷はサーボモーター」といった感じです。
一般的に言われている違いはピンとこない
ステッピングモーターとサーボモーターの違いで一般的に言われているのが、
・ステッピングモーターの方が安価でシンプル
・サーボモーターの方が高価で高性能
・低速回転はステッピングモーター、高速回転はサーボモーターが有利
といった違いですが、自分自身いまいちピンときていませんでした。
なぜステッピングモーターとサーボモーターの違いを分からない設計者が多いのか
そもそも両者の使い分けがよく分からない原因として、以下のことが挙げられます。
・流用元の機械で使われているモーターをそのまま使っているから
・なんとなくサーボモーターを選んでおけば間違いないと思っているから
・モーター選定はするけど使用する(制御する)のは電気設計者なので、実際の違いがよく分からない
・メーカーHPを調べても、自社の製品をひいきするような(サーボメーカーならサーボモーターの)説明ばかりで実際のところがはっきりしない
昔はサーボモーターは一個何十万もする高級品だったので、安価なステッピングモーターが主流でした。
しかし最近はサーボモーターもかなり安価になり、ステッピングモーターとの価格差が無くなってきています。
(実際にサーボモーターの大量仕入れにより、ステッピングモーターと同価格を実現している会社もあります)
このことからステッピングモーターとサーボモーターの両方が選択肢に入ってきたことにより、両者の違いを明確にする必要がでてきました。
分からないまま選定すると、「なんでここにサーボモーターを使っているの?」といった問に答えられなくなってしまい、何も考えずに設計していると思われてしまいます。
ステッピングモーターとサーボモーターの明確な違い
結論から言うと、以下の場合ではサーボモーターを使用するべきだと分かりました。
サーボモーター必須
・高い回転数が必要となる”減速機”や”ボールねじ”を使用した駆動
・高速位置決め(制振制御)が必要
逆に次の場面ではステッピングモーターが有利であることも分かりました。
ステッピングモーター必須
・負荷が毎回変動する
・剛性が低くゲイン調整できないような機構
それぞれ解説します。
サーボモーター必須な場面
高い回転数が必要となる”減速機”や”ボールねじ”を使用した駆動
次のグラフでも分かるように、サーボモーターの定格回転数付近ではステッピングモーターのトルクは最大値から半減してしまいます。
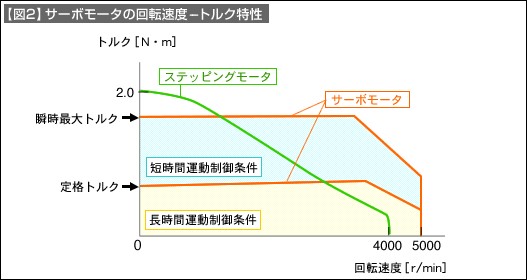
https://jp.misumi-ec.com/tech-info/categories/machine_design/md05/c1166.html
ギアヘッドなどの減速機やボールネジを使用した場合、駆動側を高速で動かすにはモーターを高い回転数にする必要がありますが、そこにステッピングモーターを使用してしまうとトルク不足になってしまうという訳です。
逆に減速機が無い場合(モーターと駆動が直結)であれば回転数が低くてもいいのでステッピングモーターでもOKです。
高速位置決め(制振制御)が必要
サーボモーターの機能の1つに”制振制御”があります。
これは駆動側の先端に発生する”ブレ”をゲイン調整により抑制する機能のことで、この機能があるおかげで狙った位置にビシッと素早く移動することができます。
↓の動画を見るとイメージが掴めると思います。
ステッピングモーターはこの制振制御ができないので振動が収まるまで待つ時間が必要になってしまいます。
しかしサーボモーターの制振制御を使えばその時間が不要になり、タクトタイムの短縮にかなり貢献できます。
例えばカメラを動かしながら検査する場合、動作の停止直後は振動で検査結果が安定しない問題が発生します。(↓の動画をご覧ください)
0.1秒の短縮にしのぎを削る設備メーカーにはかなり重要な機能ですね。
ステッピングモーター必須な場面
負荷が毎回変動する
稼働中に負荷が毎回変わるような機構では、特定の負荷に合わせて調整をするサーボモーターは不向きとなります。
逆にステッピングモーターは負荷の大小に関わらず送る量は一定なので、負荷が変動しても必ず同じ位置まで回転できます。

https://www.orientalmotor.co.jp/om/knowledge/uroko_st/st01.html
剛性が低くゲイン調整できないような機構
剛性が低い場合、モーターの動きに対して駆動側の追従が遅れてしまい、応答性をあげるようなゲイン調整が難しくなります。
例えばベルト駆動の場合、ベルトの微妙な伸び縮みによって負荷モーメントが不安定になり、その結果ゲイン調整が活用できず応答性も安定性も弱くなってしまいます。

https://www.orientalmotor.co.jp/om/knowledge/uroko_st/st01.html
まとめ
サーボモーターとステッピングモーターの使い分けは以下になります。
サーボモーターが有利!
・高い回転数が必要となる”減速機”や”ボールねじ”を使用した駆動
・高速位置決め(制振制御)が必要
ステッピングモーターが有利!
・負荷が毎回変動する
・剛性が低くゲイン調整できないような機構
それぞれ適材適所があるので、各特性を考慮してモーター選定しましょう。
コメント
[…] […]